
热点
新内容
2024欢迎访问##临沂GW8420数显表一览表
发布用户:yndlkj
发布时间:2024-11-04 14:36:57
2024欢迎访问##临沂GW8420数显表一览表
湖南盈能电力科技有限公司,专业仪器仪表及自动化控制设备等。电力电子元器件、高低压电器、电力金具、电线电缆技术研发;防雷装置检测;仪器仪表,研发;消防设备及器材、通讯终端设备;通用仪器仪表、电力电子元器件、高低压电器、电力金具、建筑材料、水暖器材、压力管道及配件、工业自动化设备销;自营和各类商品及技术的进出口。
的产品、的服务、的信誉,承蒙广大客户多年来对我公司的关注、支持和参与,才铸就了湖南盈能电力科技有限公司在电力、石油、化工、铁道、冶金、公用事业等诸多领域取得的辉煌业绩,希望在今后一如既往地得到贵单位的鼎力支持,共同创更加辉煌的明天!
但由于该传感器信号发射器和供电电池必须与应变片一同固定在转轴上,所以就给带来了一定的难度,其测量时间受到蓄电池供电能力的影响,不适合长时间监测,且其信号在传输时易受测试环境温度、湿度、粘贴技术及粘贴剂的干扰,会对测量准确度造成影响。钢弦式轴功率测量原理及方法钢弦式船舶轴功率测量方法是另外一种重要的测量方法,钢弦通过卡环在被测轴上,当应力作用于被测轴上时,轴表面产生变形,就会拉紧或放松钢弦,从而钢弦自身频率发生变化,进而可以间接测得轴系扭矩。
测试的是信号边沿时间,边沿时间是指隐性电平到显性电平时间和显性电平到隐性电平变化的总时间。隐性电平(逻辑值0)到显性电平(逻辑值1)时间为上升沿,显性电平到隐性电平为下降沿。边沿时间分为上升沿时间、下降沿时间。下降沿时间是按照电压(20%~80%电压区间,有些按照10%~90%电压区间测量边沿时间,文中以20%~80%电压区间测量边沿时间)。表中给出时间范围,如果超出规定时间,会造成波形位宽增加,采样点取值不准确,波特率异常,出现大量错误帧,一直重发数据帧也会造成CAN总线通信瘫痪。
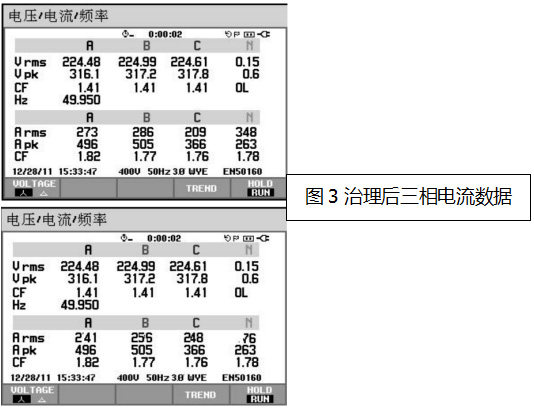
当前低压配电系统中,尤其是农网改造过程中应用较广的三相负荷不平衡自动调节装置的主要功能就是通过综合技术手段,自动检测三相电路中的不平衡问题,智能优化三相电流的不平衡,以达到“合理的分配负荷”的目的。本文通过设定不同的测试工况,来直观的检测某三相负荷不平衡自动调节装置在自动检测三相线路不平衡问题、智能优化三相电流不平衡方面的综合能力。测试工况分析待测试装置技术参数交流输入(三相四线):400V50Hz额定容量:75kVA如所示,搭建三相电流不平衡补偿测试,模拟装置智能补偿三相不平衡有功电流时的运行环境,图示测试回路中RRR3为电阻性负载。
更进一步,研发人员需设计热源和热管散热器的布设和接触。借助红外热像仪,研发人员发现热源和散热器可借助热管,实现热量的隔离传输,这让产品的设计可更加灵活。上图解说:热源功率3W;左图:热源和传统散热片直接接触,散热片温度呈现明显的热梯度分布;右图:热源通过热管将热量隔离传到给散热片,可以发现热管等温传输热量,散热片温度分布均匀;散热片远端温度较近端高.5℃,是因为散热片加热周围空气,热空气上升聚研发人员可进一步优化热管数量、大小、位置、分布等设计。降低焦虑和拥堵哈勒默梅尔市 近决定15台的FLIRTrafiOne热成像行人检测器,这些检测器可以检测行人存在信息,确认行人按钮的绿灯请求。如果热成像行人检测器检测到行人离,没有人等待过街,那么就会取消行人绿灯信号。“行人时常冒险闯红灯,”哈勒默梅尔市交通信号控制负责人GabySteenhoven说。“我们经常看到这种情况。行人按下按钮,环顾四周然后迅速穿过马路,不管行人绿灯时间是否已经启用。
测温时应尽可能的将红外测温仪发射率设置(针对可调节发射率的红外线测温仪)成与被测材料相同的发射率值的发射率,尽可能使测量示值与被测物的真实温度一致。红外线测温仪目前用途广泛,已成为检测电气设备缺陷的重要工具。由于长期用于生产一线,现场测试变电站的电气设备出线接头、T型线夹、穿墙套管接头、母排节点、闸口、电缆接头;输电线路的导线连接管、线夹或导线连接处等。由于现场使用环境恶劣以及日常维护保养不当可能引起运行中的红外线测温仪不能准确测量甚至设备故障,导致测量失准,影响电网安全稳定运行。
低于1m?的分流电阻具有并联电感,在电流检测线上会引起尖峰瞬态事件,从而使CSA前端过载。我们来谈谈滤除这些特定的尖峰瞬态事件的主要考虑因素。在某些应用中,被测量的电流可能具有固有噪声。在有噪声信号的情况下,电流检测放大器输出后的滤波通常更简单,特别是当放大器输出连接到高阻抗电路时。放大器输出节点在为滤波器选择组件时了的自由度,并且实现起来非常简单,尽管它可能需要后续的缓冲。当分流电阻值减小时,并联电感对频率响应有显著影响。
其目的是分析估计大坝的安全程度,以便及时采取措施,设法保证大坝安全运行。挖掘机械挖掘机——为了实现挖掘机的三维空间,在工作装置各关节角度传感器的基础上,又回转角度检测装置和倾角传感器,并在斗杆上激光接收仪用于检测地面激光发射器发射的水平机关相对于接收仪零位的高度。建立挖掘机的运动学模式,推导车体相对于大地的坐标变换矩阵,即完成三维空间的车体,并得到常用简单的车体高程公式,实现挖掘机挖掘轨迹的三维空间为实现挖掘机的三维空间轨迹与挖掘机深度控制打下基础。